24小时服务热线
18790282122




基于单片机的雷蒙磨自动控制系统的设计与应用_百度
基于单片机的雷蒙磨自动控制系统的设计与应用 关键词89S52;雷蒙磨;自动控制 中图分类号TP368.1文献标识码A文章编号1674-6708(2013)87-0208-02 0引言 雷蒙磨又称雷蒙 基于单片机的雷蒙磨自动控制系统的设计与应用 关键词89S52;雷蒙磨;自动控制 中图分类号TP368.1文献标识码A文章编号1674-6708(2013)87-0208-02 0引言 雷蒙磨又称雷蒙 基于单片机的雷蒙磨自动控制系统的设计与应用_百度
了解更多
雷蒙磨粉机工作原理是怎样的?
磨粉机的进料和磨辊离合机构有手动控制和自动控制两种,传统的自动控制大多是液压的。 雷蒙磨的整套工作系统包括鄂式破碎机、鼓风机、分析机、管道装置 磨粉机的进料和磨辊离合机构有手动控制和自动控制两种,传统的自动控制大多是液压的。 雷蒙磨的整套工作系统包括鄂式破碎机、鼓风机、分析机、管道装置 雷蒙磨粉机工作原理是怎样的?
了解更多
雷蒙磨的机械结构、工作原理及操作流程全介绍 百家号
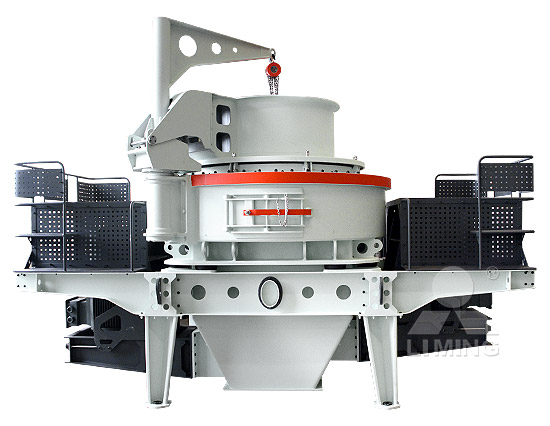
雷蒙磨的机械结构. 雷蒙磨主要由主机、分析机、鼓风机、成品旋风分离器、管道装置、电机等组成。. 其中主机由机架、进风蜗壳、铲刀、磨辊、磨环、罩壳及电 雷蒙磨的机械结构. 雷蒙磨主要由主机、分析机、鼓风机、成品旋风分离器、管道装置、电机等组成。. 其中主机由机架、进风蜗壳、铲刀、磨辊、磨环、罩壳及电 雷蒙磨的机械结构、工作原理及操作流程全介绍 百家号
了解更多
磨粉机的出粉细度控制方法
雷蒙磨粉机的研磨细度可以调节,调节范围为80-400目,可以满足大多数用户对成品粒度的要求。如果需要研磨更细的矿物材料,可以选择超细研磨或微细研磨设备。雷蒙磨的研磨细度决定了用户的效益。 雷蒙磨粉机的研磨细度可以调节,调节范围为80-400目,可以满足大多数用户对成品粒度的要求。如果需要研磨更细的矿物材料,可以选择超细研磨或微细研磨设备。雷蒙磨的研磨细度决定了用户的效益。磨粉机的出粉细度控制方法
了解更多
如何对雷蒙磨粉机进行规范的操作使用与保养?
雷蒙磨粉机在安装前对操作人员必须进行必要的技术培训,使之了解雷蒙磨粉机的原理性能,熟悉操作规程。 2、雷蒙磨粉机细度调节,根据物料的大小、软硬、含水量、比重不 雷蒙磨粉机在安装前对操作人员必须进行必要的技术培训,使之了解雷蒙磨粉机的原理性能,熟悉操作规程。 2、雷蒙磨粉机细度调节,根据物料的大小、软硬、含水量、比重不 如何对雷蒙磨粉机进行规范的操作使用与保养?
了解更多
雷蒙磨粉机设备_百度百科
用于磨粉的设备. 雷蒙磨是从国外传入的一种制粉磨机,国内生产较多。. 它适用各种矿粉制备、煤粉制备,比如生料矿、 石膏矿 、煤炭等材料的细粉加工。. 雷蒙磨粉机设备广泛适 用于磨粉的设备. 雷蒙磨是从国外传入的一种制粉磨机,国内生产较多。. 它适用各种矿粉制备、煤粉制备,比如生料矿、 石膏矿 、煤炭等材料的细粉加工。. 雷蒙磨粉机设备广泛适 雷蒙磨粉机设备_百度百科
了解更多
雷蒙磨原理及选型 百家号
4. 易于操作和维护:雷蒙磨操作简单,维修方便,可实现自动化控制。 三、雷蒙磨应用领域 1. 陶瓷行业:陶瓷行业需要大量的石英砂、长石等原料,雷蒙磨可用 4. 易于操作和维护:雷蒙磨操作简单,维修方便,可实现自动化控制。 三、雷蒙磨应用领域 1. 陶瓷行业:陶瓷行业需要大量的石英砂、长石等原料,雷蒙磨可用 雷蒙磨原理及选型 百家号
了解更多
雷蒙磨设备的原理是是什么?
雷蒙磨设备是一种常用的研磨制粉设备,雷蒙磨粉机适用于莫氏硬度不大于9.3级,湿度百分之8以下的非易燃易爆的300多种物料的磨粉加工。并且采用立式结构,占地面积小,目数可以随意的调节等优点, 雷蒙磨设备是一种常用的研磨制粉设备,雷蒙磨粉机适用于莫氏硬度不大于9.3级,湿度百分之8以下的非易燃易爆的300多种物料的磨粉加工。并且采用立式结构,占地面积小,目数可以随意的调节等优点, 雷蒙磨设备的原理是是什么?
了解更多
雷蒙粉_百度百科
磨辊辊轴固定在一个可单向活动的摇臂上,每个摇臂由可调节的弹簧控制粉磨力。这种改进型雷蒙磨系统的通风有正压和负压直吹两种方式。此型式的雷蒙磨专利不久就被美国燃烧工程公司(Combustion Engineering 磨辊辊轴固定在一个可单向活动的摇臂上,每个摇臂由可调节的弹簧控制粉磨力。这种改进型雷蒙磨系统的通风有正压和负压直吹两种方式。此型式的雷蒙磨专利不久就被美国燃烧工程公司(Combustion Engineering雷蒙粉_百度百科
了解更多
潍坊市精华粉体工程设备有限公司,粉碎机,气流粉碎机
为您展示潍坊市精华粉体工程设备有限公司AB系列气流粉碎机、AF系列气流分级机、GX系列颗粒干洗机以全新的专利技术和先进的专有技术在国内粉体工程行业保持先进地位。联系方式:0536-6946689网址:powder 为您展示潍坊市精华粉体工程设备有限公司AB系列气流粉碎机、AF系列气流分级机、GX系列颗粒干洗机以全新的专利技术和先进的专有技术在国内粉体工程行业保持先进地位。联系方式:0536-6946689网址:powder 潍坊市精华粉体工程设备有限公司,粉碎机,气流粉碎机
了解更多
5R雷蒙磨粉机 百度百科
5R4121雷蒙磨粉机主机内装有5个磨辊总承装置,其磨辊尺寸为Φ410*210,最大进料粒度为30毫米,成品粒度范围可达到0.18-0.025毫米(相当于80-600目),可以通过风量的调节来控制成品粉子的细度,5R 5R4121雷蒙磨粉机主机内装有5个磨辊总承装置,其磨辊尺寸为Φ410*210,最大进料粒度为30毫米,成品粒度范围可达到0.18-0.025毫米(相当于80-600目),可以通过风量的调节来控制成品粉子的细度,5R 5R雷蒙磨粉机 百度百科
了解更多
雷蒙磨规格、型号和技术参数解析-
雷蒙磨型号和技术参数表中包含的参数很多,我们需要关注的重点参数有: 最大进料粒度、出料粒度、生产能力 这三项,我们应该对不同雷蒙磨的抗压能力有一个详细的了解,然后可以选择更适合研磨我们物料的设备。. 雷蒙磨的进料粒度是该设备允许的最大 雷蒙磨型号和技术参数表中包含的参数很多,我们需要关注的重点参数有: 最大进料粒度、出料粒度、生产能力 这三项,我们应该对不同雷蒙磨的抗压能力有一个详细的了解,然后可以选择更适合研磨我们物料的设备。. 雷蒙磨的进料粒度是该设备允许的最大 雷蒙磨规格、型号和技术参数解析-
了解更多
内模控制(Internal Model Control, IMC)的基本原理 哔哩哔哩
内模控制(Internal Model Control, IMC)最早是由控制工程学者弗朗西斯(B. A. Francis)及翁汉(W. M. Wonham)所提出的,它是一种针对基于过程数学模型进行控制器设计的新型控制策略,由于它具有设计简单,控制性能好和在系统分析方面的优越性,因此它在工业过程控制中具有重要的研究意义。 内模控制(Internal Model Control, IMC)最早是由控制工程学者弗朗西斯(B. A. Francis)及翁汉(W. M. Wonham)所提出的,它是一种针对基于过程数学模型进行控制器设计的新型控制策略,由于它具有设计简单,控制性能好和在系统分析方面的优越性,因此它在工业过程控制中具有重要的研究意义。内模控制(Internal Model Control, IMC)的基本原理 哔哩哔哩
了解更多
如何理解模糊控制?
模糊控制(Fuzzy Control) ,也称为模糊逻辑控制(Fuzzy Logic Control),控制技术的一种。 它是一种以模糊集合论、模糊语言变量和模糊逻辑推理为基础的计算机数字控制技术。 模糊集合论(模糊逻辑)被提出后吸引了众多的学者对其进行研究,使其理论和方法日益完善,并且广泛的应用于自然科学和社会 模糊控制(Fuzzy Control) ,也称为模糊逻辑控制(Fuzzy Logic Control),控制技术的一种。 它是一种以模糊集合论、模糊语言变量和模糊逻辑推理为基础的计算机数字控制技术。 模糊集合论(模糊逻辑)被提出后吸引了众多的学者对其进行研究,使其理论和方法日益完善,并且广泛的应用于自然科学和社会如何理解模糊控制?
了解更多
聊聊H∞鲁棒控制(Robust Control)
聊聊H∞鲁棒控制 (Robust Control) 在实际控制系统中,被控对象的模型往往存在一定的不确定性,以自动驾驶的车辆为例,车内乘客或者货物的重量变化会造成被控系统的模型波动。. 该类经常存在的问题,对控制器的设计提出挑战,因此要求所设计的控制器具有 聊聊H∞鲁棒控制 (Robust Control) 在实际控制系统中,被控对象的模型往往存在一定的不确定性,以自动驾驶的车辆为例,车内乘客或者货物的重量变化会造成被控系统的模型波动。. 该类经常存在的问题,对控制器的设计提出挑战,因此要求所设计的控制器具有聊聊H∞鲁棒控制(Robust Control)
了解更多
滑模控制(SMC)学习笔记1——基本概念综述 哔哩哔哩
1.1 滑模变结构控制简介 变结构控制(VSC)本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性;这种控制策略与其他控制的不同之处在于系统的“结构”不固定,而且可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等),有目的地不断变化,迫使系统按照预定“滑动模态”的 1.1 滑模变结构控制简介 变结构控制(VSC)本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性;这种控制策略与其他控制的不同之处在于系统的“结构”不固定,而且可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等),有目的地不断变化,迫使系统按照预定“滑动模态”的滑模控制(SMC)学习笔记1——基本概念综述 哔哩哔哩
了解更多
控制(2019年Remedy Entertainment制作第三人称动作冒险
《控制》是Remedy Entertainment制作、505 Games发行的一款第三人称动作冒险游戏,于登陆PC、Xbox One、PS4平台,后发售的DLC收录版本《控制 终极合辑》登陆Xbox Series X|S、Switch、PS5平台。 游戏讲述了位于纽约的一座秘密机构遭到异界不速之客入侵,而女主角杰西芳登成为了新的主管,与其他 《控制》是Remedy Entertainment制作、505 Games发行的一款第三人称动作冒险游戏,于登陆PC、Xbox One、PS4平台,后发售的DLC收录版本《控制 终极合辑》登陆Xbox Series X|S、Switch、PS5平台。 游戏讲述了位于纽约的一座秘密机构遭到异界不速之客入侵,而女主角杰西芳登成为了新的主管,与其他控制(2019年Remedy Entertainment制作第三人称动作冒险
了解更多
Control Center,雷神的操控中心你会用吗? 【控制台
本文禁止转载或摘编. 什么是Control Center雷神Control Center是雷神游戏本各种炫酷功能的控制中心,共有两个版本,分别是雷神Control Center1.0.0.8以及雷神Control Center 3.0。. 两款控制器的主要区别就在于整体外观风格的不同,其功能基本相同。. 主界面图下图所示:雷神 本文禁止转载或摘编. 什么是Control Center雷神Control Center是雷神游戏本各种炫酷功能的控制中心,共有两个版本,分别是雷神Control Center1.0.0.8以及雷神Control Center 3.0。. 两款控制器的主要区别就在于整体外观风格的不同,其功能基本相同。. 主界面图下图所示:雷神Control Center,雷神的操控中心你会用吗? 【控制台
了解更多
以撒的结合:忏悔 控制台代码使用说明 哔哩哔哩
事先声明:使用控制台会大大降低游戏难度 但同时也会大大失去游戏乐趣,请谨慎使用打成就也是游戏乐趣所在使用控制台条件:***需要购买本体+三个DLC才能进一步操作,其中本体为Rebirth,三个DLC分别是Afterbirth,Afterbirth+,Repentance**如果没有购买Repentance,只购买到了Afterbirth+,无须看本教程,因为 事先声明:使用控制台会大大降低游戏难度 但同时也会大大失去游戏乐趣,请谨慎使用打成就也是游戏乐趣所在使用控制台条件:***需要购买本体+三个DLC才能进一步操作,其中本体为Rebirth,三个DLC分别是Afterbirth,Afterbirth+,Repentance**如果没有购买Repentance,只购买到了Afterbirth+,无须看本教程,因为以撒的结合:忏悔 控制台代码使用说明 哔哩哔哩
了解更多
模糊控制
模糊控制器(Fuzzy Controller—FC) :也称为模糊逻辑控制器(Fuzzy Logic Controller—FLC),由于所采用的模糊控制规则是由模糊理论中模糊条件语句来描述的,因此模糊控制器是一种语言型控制器,故也称为模糊 模糊控制器(Fuzzy Controller—FC) :也称为模糊逻辑控制器(Fuzzy Logic Controller—FLC),由于所采用的模糊控制规则是由模糊理论中模糊条件语句来描述的,因此模糊控制器是一种语言型控制器,故也称为模糊 模糊控制
了解更多
如何用手机远程协助长辈?我找出了6个最佳方法
无需复杂的设置,只需要免费创建账号,分别装好控制端(TeamViewer)和被控端(Quicksupport)之后. 在「控制端」输入「被控端」提供的9位数连接码,即可开始远程控制. TeamViewer 牛逼之处在于被控端 无需ROOT ,而且还 能用 iOS 控制安卓. 下图是阿虚用我 无需复杂的设置,只需要免费创建账号,分别装好控制端(TeamViewer)和被控端(Quicksupport)之后. 在「控制端」输入「被控端」提供的9位数连接码,即可开始远程控制. TeamViewer 牛逼之处在于被控端 无需ROOT ,而且还 能用 iOS 控制安卓. 下图是阿虚用我 如何用手机远程协助长辈?我找出了6个最佳方法
了解更多
看完这篇文章,没有人比你更懂机械臂柔顺控制
说到底,机械臂柔顺控制技术只是一个工具,这个工具能为我们的目标服务,那么它就是个「好工具」。. 如前面所述,机械臂柔顺控制技术,主要是为了解决机械臂与外界接触交互的应用问题。. 只要我们仔细研究具体的应用场景,就会发现需求之间的大有不同 说到底,机械臂柔顺控制技术只是一个工具,这个工具能为我们的目标服务,那么它就是个「好工具」。. 如前面所述,机械臂柔顺控制技术,主要是为了解决机械臂与外界接触交互的应用问题。. 只要我们仔细研究具体的应用场景,就会发现需求之间的大有不同看完这篇文章,没有人比你更懂机械臂柔顺控制
了解更多
工业控制与自动化领域中,运动控制怎么理解?
运动控制是自动化的一个分支,它使用通称为伺服机构的一些设备如液压泵,线性执行机或者是电机来控制机器。运动控制被广泛应用在包装、印刷、纺织和装配工业中。可以说,运动控制技术是工业制造领域应用广泛并且高端的技术。 运动控制是自动化的一个分支,它使用通称为伺服机构的一些设备如液压泵,线性执行机或者是电机来控制机器。运动控制被广泛应用在包装、印刷、纺织和装配工业中。可以说,运动控制技术是工业制造领域应用广泛并且高端的技术。工业控制与自动化领域中,运动控制怎么理解?
了解更多
永磁同步电机高性能控制算法(3)——基于扩展/扩张
无差拍预测电流控制是属于模型预测控制的一种。 模型预测控制需要精确的电机参数,当发生参数失配时,DPCC的控制性能就会急剧下降。 在预测控制中,控制器一般采用的电机铭牌标称参数或者通过辨识算法测量估算的 电机参数,则实际无差拍电流预测控制输出方程表示如式(3-16)到式(3-19)所示: 无差拍预测电流控制是属于模型预测控制的一种。 模型预测控制需要精确的电机参数,当发生参数失配时,DPCC的控制性能就会急剧下降。 在预测控制中,控制器一般采用的电机铭牌标称参数或者通过辨识算法测量估算的 电机参数,则实际无差拍电流预测控制输出方程表示如式(3-16)到式(3-19)所示:永磁同步电机高性能控制算法(3)——基于扩展/扩张
了解更多
英灵神殿迷雾之地版本控制台代码大全(最新版
英灵神殿迷雾之地版本控制台代码大全一.打开控制台权限1.打开Steam,在库中找到英灵神殿英灵神殿2.右键游戏,选择最后一栏的“属性”属性3.选择通用,在最下方启动选项中输入 -console 即可开启控制台权限-console二.打开控制台在开启控制台权限后,即可在游戏内开启控制台按“F5”,即可 英灵神殿迷雾之地版本控制台代码大全一.打开控制台权限1.打开Steam,在库中找到英灵神殿英灵神殿2.右键游戏,选择最后一栏的“属性”属性3.选择通用,在最下方启动选项中输入 -console 即可开启控制台权限-console二.打开控制台在开启控制台权限后,即可在游戏内开启控制台按“F5”,即可英灵神殿迷雾之地版本控制台代码大全(最新版
了解更多
协作机器人柔顺运动控制综述(上)
因此,研究与应用柔顺运动控制方法成为了当前提高协作机器人柔顺运动性能的首要手段,备受研究学者关注。. 柔顺运动控制方法可大致分为直接法和间接法两大类,直接法指的是分别对力和运动进行直接控制,而间接法指的是对力和运动之间的动态关系进行 因此,研究与应用柔顺运动控制方法成为了当前提高协作机器人柔顺运动性能的首要手段,备受研究学者关注。. 柔顺运动控制方法可大致分为直接法和间接法两大类,直接法指的是分别对力和运动进行直接控制,而间接法指的是对力和运动之间的动态关系进行协作机器人柔顺运动控制综述(上)
了解更多
电控4:永磁同步电机MTPA与弱磁控制的统一理解
前言:在 电控3:从电压矢量角度来理解“永磁同步电机弱磁控制” 一文中,我们已经介绍了如何来理解表贴式永磁同步电机的弱磁控制过程,本文我们尝试对“内插式”永磁同步电机的mtpa(最大转矩电流比)控制,以及弱磁控制进行统一理解。. 1、什么是mtpa. mtpa,学名叫做最大转矩电流比控制 前言:在 电控3:从电压矢量角度来理解“永磁同步电机弱磁控制” 一文中,我们已经介绍了如何来理解表贴式永磁同步电机的弱磁控制过程,本文我们尝试对“内插式”永磁同步电机的mtpa(最大转矩电流比)控制,以及弱磁控制进行统一理解。. 1、什么是mtpa. mtpa,学名叫做最大转矩电流比控制电控4:永磁同步电机MTPA与弱磁控制的统一理解
了解更多
超螺旋滑模控制方法为什么能够减小抖振的发生?
滑模控制器的抖振是由于控制信号不连续造成的,减小抖振就是要想办法消除就是要使信号变得连续(也就是更加平滑, 就是可导的阶数更高)。要使设计一个连续的控制器最好的方式就是引入积分,因为一个积分信号总是连续的。 滑模控制器的抖振是由于控制信号不连续造成的,减小抖振就是要想办法消除就是要使信号变得连续(也就是更加平滑, 就是可导的阶数更高)。要使设计一个连续的控制器最好的方式就是引入积分,因为一个积分信号总是连续的。超螺旋滑模控制方法为什么能够减小抖振的发生?
了解更多
运动控制是什么?
运动控制起源于早期的伺服控制。简单地说,运动控制就是对机械运动部件的位置、速度等进行实时的控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动。 早期的运动控制技术主要是伴随着数控技术、机器人技术和工厂自动化技术的发展而发展的。 运动控制起源于早期的伺服控制。简单地说,运动控制就是对机械运动部件的位置、速度等进行实时的控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动。 早期的运动控制技术主要是伴随着数控技术、机器人技术和工厂自动化技术的发展而发展的。运动控制是什么?
了解更多
分析|永磁同步电机力矩控制技术全解!
一、什么是力矩控制. 永磁同步电机在汽车上的应用越来越广泛,从动力驱动到转向刹车的执行机构,都可以见到其踪影。. 任何电机的控制,无非三种不同的控制目标:. 位置控制:想让电机转多少度它就转多少度. 速度控制:想让电机转多快它就转多快. 力矩 一、什么是力矩控制. 永磁同步电机在汽车上的应用越来越广泛,从动力驱动到转向刹车的执行机构,都可以见到其踪影。. 任何电机的控制,无非三种不同的控制目标:. 位置控制:想让电机转多少度它就转多少度. 速度控制:想让电机转多快它就转多快. 力矩分析|永磁同步电机力矩控制技术全解!
了解更多
请问机器人阻抗控制中的导纳控制具体如何实现的
图1 导纳控制原理图. 导纳控制原理图如图1所示。图中 x 为负载的当前位置。 其余符号在下面的公式中进行说明。图1上部分表示系统的初始状态,下半部分表示液压缸驱动负载触碰到障碍物K(黄色)上,并对其进行了一定 图1 导纳控制原理图. 导纳控制原理图如图1所示。图中 x 为负载的当前位置。 其余符号在下面的公式中进行说明。图1上部分表示系统的初始状态,下半部分表示液压缸驱动负载触碰到障碍物K(黄色)上,并对其进行了一定 请问机器人阻抗控制中的导纳控制具体如何实现的
了解更多
阻抗控制公式的理解与细致推导
1.阻抗控制的基本思想是将系统的表现调节为和某个实际物理系统特性相同的系统,即质量-刚度-阻尼系统。 将公式2带入公式1可以得到 在系统达到平衡状态时,假设我们用手推动机器人,在关节上造成一个瞬时力矩 \tau_{instant} ,则系统的瞬态反应为 1.阻抗控制的基本思想是将系统的表现调节为和某个实际物理系统特性相同的系统,即质量-刚度-阻尼系统。 将公式2带入公式1可以得到 在系统达到平衡状态时,假设我们用手推动机器人,在关节上造成一个瞬时力矩 \tau_{instant} ,则系统的瞬态反应为阻抗控制公式的理解与细致推导
了解更多
随机分析、随机控制等科目在量化投资、计算金融
随机最优控制的应用还真就是算法交易方面比较多,也就是@雷骁 同学提到的optimal execution和 optimal order placement 。. 可是,想没想过为什么这么多人把随机控制的方法都集中在研究算法交易上?. 我想可以从经典的Merton problem上找原因,也就是如果你的 投资组合 随机最优控制的应用还真就是算法交易方面比较多,也就是@雷骁 同学提到的optimal execution和 optimal order placement 。. 可是,想没想过为什么这么多人把随机控制的方法都集中在研究算法交易上?. 我想可以从经典的Merton problem上找原因,也就是如果你的 投资组合随机分析、随机控制等科目在量化投资、计算金融
了解更多
《深海迷航》控制台作弊码 哔哩哔哩
# 深海迷航 ## 作弊码 控制台代码 ## 以下代码均是up主实验过的代码,请放心食用# 请合理使用控制台代码,过度依赖代码会大大降低游戏可玩性# 并没有列出全部代码,少量几乎不会用到的代码没有列出来# 什么?你问我在哪儿输入控制台代码?emmm请右转百度搜索“深海迷航怎么打开控制台”# 篇幅 # 深海迷航 ## 作弊码 控制台代码 ## 以下代码均是up主实验过的代码,请放心食用# 请合理使用控制台代码,过度依赖代码会大大降低游戏可玩性# 并没有列出全部代码,少量几乎不会用到的代码没有列出来# 什么?你问我在哪儿输入控制台代码?emmm请右转百度搜索“深海迷航怎么打开控制台”# 篇幅《深海迷航》控制台作弊码 哔哩哔哩
了解更多
求助电化学方面的大佬,表面控制和扩散控制是啥
关注. 简单地讲,扩散控制就是你的 redox 在你的电解质里只能扩散那么快,就算你 电极 一秒可以消耗10个,但是从 体相溶液 扩散来的只有2个,那你的电极此时实际消耗就是一秒2个。. 那只要你扩散的比你电极能消耗的小就是扩散控制(广义). 在应用时,如果 关注. 简单地讲,扩散控制就是你的 redox 在你的电解质里只能扩散那么快,就算你 电极 一秒可以消耗10个,但是从 体相溶液 扩散来的只有2个,那你的电极此时实际消耗就是一秒2个。. 那只要你扩散的比你电极能消耗的小就是扩散控制(广义). 在应用时,如果求助电化学方面的大佬,表面控制和扩散控制是啥
了解更多
如何摆脱机房教师控制?
如何解除机房教师控制?在机房上课,电脑都是win7系统,而且老师能控制屏幕,想要摆脱老师的控制,该怎么操作呢?下面我们就来看看Win7摆脱学校机房教师控制电脑的技巧 学校机房的电脑都可以被老师控制,随时可以 如何解除机房教师控制?在机房上课,电脑都是win7系统,而且老师能控制屏幕,想要摆脱老师的控制,该怎么操作呢?下面我们就来看看Win7摆脱学校机房教师控制电脑的技巧 学校机房的电脑都可以被老师控制,随时可以如何摆脱机房教师控制?
了解更多
机器人的阻抗控制方法好像已经做的很好了,为什么
阻抗控制也是实现力控制的一种思路,但更高层面上,它是统一了位置控制与力控制的框架;而 阻抗控制 与导纳 控制理论 上是等效的。. 2.对于力控制,最困难的还是如何获取机器人与外界的 交互力 。. 现有的 工业机器人 以及类似UR这种的,通过 电流环 获 阻抗控制也是实现力控制的一种思路,但更高层面上,它是统一了位置控制与力控制的框架;而 阻抗控制 与导纳 控制理论 上是等效的。. 2.对于力控制,最困难的还是如何获取机器人与外界的 交互力 。. 现有的 工业机器人 以及类似UR这种的,通过 电流环 获 机器人的阻抗控制方法好像已经做的很好了,为什么
了解更多
Simulink火速入坑 PID控制模型
simulink仿真快速入门 PID控制案例 本次的主题是matlab的好哥们——simulink,并附上一个简单的PID控制案例,带你火速入坑。 1 概念入门1.1 仿真是什么?仿真是 将实际系统的物理、数学机理等移植到计算机虚拟环 simulink仿真快速入门 PID控制案例 本次的主题是matlab的好哥们——simulink,并附上一个简单的PID控制案例,带你火速入坑。 1 概念入门1.1 仿真是什么?仿真是 将实际系统的物理、数学机理等移植到计算机虚拟环Simulink火速入坑 PID控制模型
了解更多